I've played with the excellent AVR Butterfly DDS controller, but it's a little fiddly for regular use.
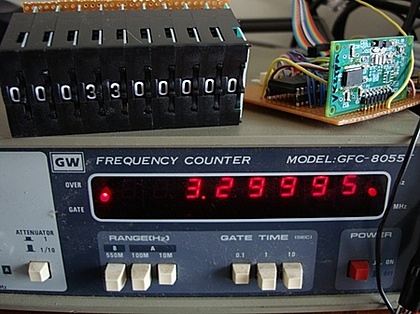
BCD thumb switches seem like a nice approach as they remove the need for a display. Here's how it looks:
And here's my rather messy prototype board with the BCD switch wiring.
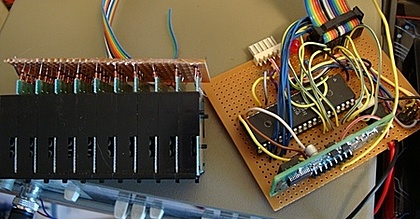
I wanted lots of I/O pins for scanning the BCD switch array (12 wires) and talking to the AD9851 DDS chip (3 wires) so I chose an Atmel ATmega32.
As frequency in the CPU isn't important, my design just uses the internal 8Mhz oscillator.
The code is written with avr-gcc, uses avr-libc and burnt with avrdude, all on a Mac. (Installed with Darwin ports).
I scan the BCD switches and if the value has changed I write to the DDS. There's a single LED that I flash when I write. (It's fun debugging code when you only have a single LED to let you know what's going on).
Note that there is a bug in MacPorts which won't build avr-libc. The tip about how to get past this is here.
The hard bit is driving the DDS chip and that code is here.
Update
Figured out a problem that might bite others, I was trying to use port c pins which were set for JTAG mode in the CPU fuse bytes, thanks to AVRFuse this was easily fixed.
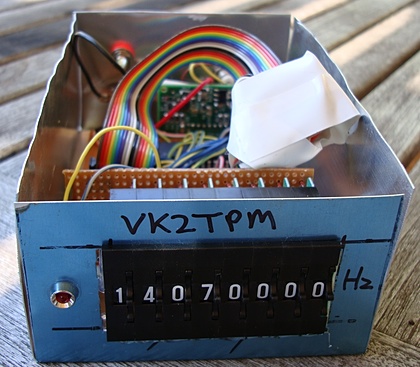
I also realised that I have too many digits, so next step is to remove excess and put all this in a box. Done:
Here's the code:
/* Scan 8 BCD switches and set a DDS to the frequency
Peter Marks VK2TPM
http://marxy.org
*/
#include <avr/interrupt.h>
#define F_CPU 800000UL
#include <util/delay.h>
#include <math.h> // for pow()
#define LED_BLINK_MS 500
#define SCAN_DELAY_MS 20
#define SCAN_LOW_PORT PORTA // low 8 digits scan output
#define READ_BCD_PORT PORTC // read BCD bits 0-3
#define LEDOFF PORTB &= ~(1<<2)
#define LEDON PORTB |= (1<<2)
// Pins used to talk to the DDS chip
#define DDS_LOAD 6
#define DDS_CLOCK 5
#define DDS_DATA 4
#define DDS_CLOCK_HZ 180000000UL
#define DDS_OUTPORT PORTD
#define DDS_OUTPORTDIRECTION DDRD
void ioInit();
unsigned long scanFrequency();
void blinkLed();
unsigned long tenPower(int decimal);
void sendFrequency(unsigned long frequency);
void byte_out(unsigned char byte);
void outOne();
void outZero();
void bitSetHi(volatile uint8_t *port, int bit);
void bitSetLo(volatile uint8_t *port, int bit);
int main()
{
ioInit();
blinkLed();
unsigned long lastFrequency = 0;
unsigned long newFrequency = 0;
while(1)
{
newFrequency = scanFrequency();
if(newFrequency != lastFrequency)
{
sendFrequency(newFrequency);
blinkLed();
lastFrequency = newFrequency;
}
}
return(0);
}
// Scan the BCD thumbwheels and return the frequency
unsigned long scanFrequency()
{
int i;
unsigned int readBcd = 0;
unsigned long frequency = 0;
for(i = 0; i < 8; i++)
{
SCAN_LOW_PORT = (1 << i);
_delay_ms(SCAN_DELAY_MS);
readBcd = PINC & 0x0f;
_delay_ms(SCAN_DELAY_MS);
if(i == 0)
frequency = readBcd;
else
frequency += (readBcd * tenPower(i));
}
SCAN_LOW_PORT = 0;
return frequency;
}
unsigned long tenPower(int decimal)
{
unsigned long result = 10;
int i;
if(decimal == 0)
return 1;
for(i = 0; i < decimal - 1; i++)
{
result *= 10;
}
return result;
}
void blinkLed()
{
LEDON;
_delay_ms(LED_BLINK_MS);
LEDOFF;
_delay_ms(LED_BLINK_MS);
}
void ioInit()
{
DDRA = 0xff; // enable output
DDRB = 0xff; // enable output
DDRC = 0xf0; // C is input on lower 4 bits
DDRD = 0xff; // D is for DDS control
}
// DDS control code
void bitSetHi(volatile uint8_t *port, int bit)
{
*port |= ( 1<<bit );
}
void bitSetLo(volatile uint8_t *port, int bit)
{
*port &= ~( 1<<bit );
}
void sendFrequency(unsigned long frequency)
{
unsigned long tuning_word = (frequency * pow(2, 32)) / DDS_CLOCK_HZ;
bitSetLo(&DDS_OUTPORT, DDS_LOAD); // take load pin low
int i;
for(i = 0; i < 32; i++)
{
if ((tuning_word & 1) == 1)
outOne();
else
outZero();
tuning_word = tuning_word >> 1;
}
byte_out(0x09);
bitSetHi(&DDS_OUTPORT, DDS_LOAD); // Take load pin high again
}
void byte_out(unsigned char byte)
{
int i;
for (i = 0; i < 8; i++)
{
if ((byte & 1) == 1)
outOne();
else
outZero();
byte = byte >> 1;
}
}
void outOne()
{
bitSetLo(&DDS_OUTPORT, DDS_CLOCK);
_delay_ms(1);
bitSetHi(&DDS_OUTPORT, DDS_DATA);
_delay_ms(1);
bitSetHi(&DDS_OUTPORT, DDS_CLOCK);
_delay_ms(1);
bitSetLo(&DDS_OUTPORT, DDS_DATA);
_delay_ms(1);
}
void outZero()
{
bitSetLo(&DDS_OUTPORT, DDS_CLOCK);
_delay_ms(1);
bitSetLo(&DDS_OUTPORT, DDS_DATA);
_delay_ms(1);
bitSetHi(&DDS_OUTPORT, DDS_CLOCK);
_delay_ms(1);
}
The circuit

The BCD switches have small diodes from each of the outputs 1,2,4,8 to a common bus which goes to a 4k7 pull down resistor and to input pins. (If I built this again, I'd reverse the diodes and use the CPU's internal pull-up resistors to save some wiring).
Output pins directly drive the common on each BCD swich to scan them with a brief +5V.
There's a 7805 3 terminal regulator to regulate 12V down to 5V for the CPU, the 12V line goes direct to the DDS-60. The input has a forward diode to protect against reverse polarity. One pin has an LED with a 1k resistor that flashes on power up and on each frequency change.
I brought out the programming pins on a little header. Also I had a go at a serial interface but haven't got it working yet.
Update
Hey, cheers to NT7S blog and thanks for the encouragement!
3 comments:
This is great Peter, I'm glad you got that working you've been talking about doing it for a while now. Lots of diodes in the BCD switch scanning matrix, neat construction!
Thanks Alan,
Yes, I've been thinking about this for months but basically built it over the past 48 hours.
The diode matrix is built on a strip of veroboard on the back of the BCD switches.
Once I get it fully debugged I'm thinking of putting a serial interface on it for computer control as well, combine that with a logarithmic rf meter and you've got a really useful gadget.
Hallo Peter, thanks for sharing all those information. I have also DDS60 kit and I would like build one day QRP TRX on my own controlled from AVR cpu with my firmware. Now I am reading about programming in C for AVR and your article is great inpiration to me!
73! Tomas
Post a Comment